

Soft robotics is a field gaining increasing interest among engineers, particularly due to its growing use in the biomedical industry. For example, as advancements in biomimicry continue to evolve and improve over time, soft robots have shown promise for applications such as prosthetics, artificial muscles, and surgical instruments. Actuators play a critical role in this field, as they essentially act as the muscles of the robot. In this blog post, we will explore how ionic polymer–metal composites (IPMCs) can be used as actuators with a manta-ray inspired soft robot model.
A Manta-Ray Inspired Soft Robot
Robots have traditionally been made out of rigid, hard materials. However, the development of soft robots — designing robots out of flexible materials such as elastomers, gels, or silicone rubber — has greatly expanded the ways in which robots can be used, especially for biomimicry and biomedical uses. For example, manta-ray inspired soft robots can be controlled remotely and equipped with sensors on their undersides, allowing scientists to gather data for marine biodiversity studies without disrupting aquatic life. They are more maneuverable, less likely to get tangled in aquatic plants, and cause less turbulence than traditional propeller-powered underwater vehicles.
 A manta ray in the wild. Photo by Ishan @seefromthesky on Unsplash.
A manta ray in the wild. Photo by Ishan @seefromthesky on Unsplash.
With modeling and simulation, soft robotics engineers can study the design of robotic manta rays to improve their biomimicry capabilities. The Ionic Polymer–Metal Composite Actuators in a Robotic Manta Ray example shows one way to set up a model to study the performance of actuators in a robotic manta ray. This model measures at about 20 cm in length and 50 cm in wingspan, which is comparable to real-world builds of robotic manta rays. It uses ionic polymer–metal composite (IPMC) actuators to power the robot, with the Shrinkage and Swelling multiphysics coupling enabling it to respond to movement in a fluid environment, such as underwater in the ocean. IPMCs are a subcategory of electroactive polymers, which are actuating materials that generate large deformations under electrical stimuli. Ionic electroactive polymers are powered by the ionic transportation-induced swelling effect, which typically requires only 1 or 2 V of actuation voltage and naturally generates a bending motion. IPMCs are an ideal material for artificial muscles due to their lightweight nature, maneuverability, and ability to generate a flapping motion with electrical stimuli, as opposed to a power transmission, which is energy-inefficient.
The Shrinkage and Swelling multiphysics coupling was introduced in COMSOL Multiphysics® version 6.3. This coupling is particularly useful in models that experience swelling and shrinking via a substance entering and dissolving from their material, respectively. In such models, when the substance leaves the material, the material will shrink, similar to a sponge swelling and shrinking as it absorbs water and then dries out. In the context of the model featured throughout this blog post, the substance would be hydrated cations, causing the fin of the manta ray to shrink and swell in response to the the motion.
The robotic manta ray model.
Modeling Ionic Polymer–Metal Composites
In the model, the two beams in the fin are made of IPMC material in three layers, with the middle layer containing the polymer that houses the moving ions. The top and bottom layers consist of a thin metal plate that conducts electricity and generates voltage for the charged particles to move up and down, which creates the flapping motion.
The driving force is provided by an external electric potential applied through two metallic electrodes, with a sinusoidal electric potential applied to the upper electrode, while the lower one serves as the ground. The fin is then firmly attached to the beams and can passively deform. The measure of deformation examines how much the shape has changed due to motion, which in this case is caused by swelling from a change in the concentration of hydrated cations within the polymer. The IPMCs generate force through multiphysics, which involves structural deformation, mass transport, and electric currents. The model couples the Transport in Solids and Solid Mechanics interfaces to help account for the swelling-induced deformation of the beam. The constitutive equations that relate displacement, concentration, and electric potential are derived from thermodynamic principles.
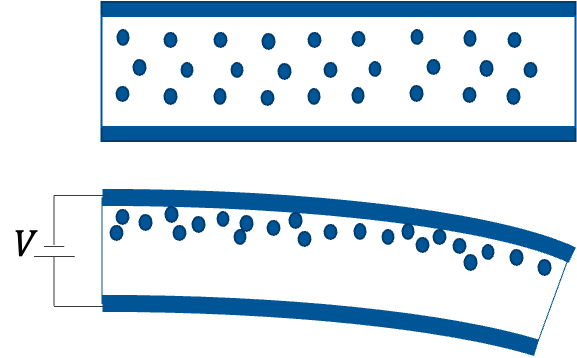 A visual representation of how the IPMC beams bend, shrink, and swell, changing the position of the particles.
A visual representation of how the IPMC beams bend, shrink, and swell, changing the position of the particles.
In addition, the Charge Conservation in Solids feature is used to enforce charge conservation in the solid domain where the ionic polymer beams are located. The Transport in Solids interface is used to track the diffusion, which is driven by the gradient of chemical potential.
Movement of the Manta Ray
The results of the model demonstrate that the movement of the two IPMC beams can be electrically controlled. The study focuses on showing that the manta ray can move when an input voltage is supplied, for example, from a battery. It highlights the successful generation of an even flapping motion by the two IPMC beams. However, the model has not been developed to demonstrate how the manta ray would respond in the water or if it could swim.
The graph at left below shows the sinusoidal input voltage, consisting of 5 V at 0.2 Hz, with a phase delay present between the IPMC beams. The graph at right below shows the resulting deflection of the IPMC beams. The beam closer to the trailing edge, represented by the green line, experiences more significant deformation due to its longer length. The cyclic motion of the positive cations through the polymer causes the beams to bend cyclically as a result of swelling.
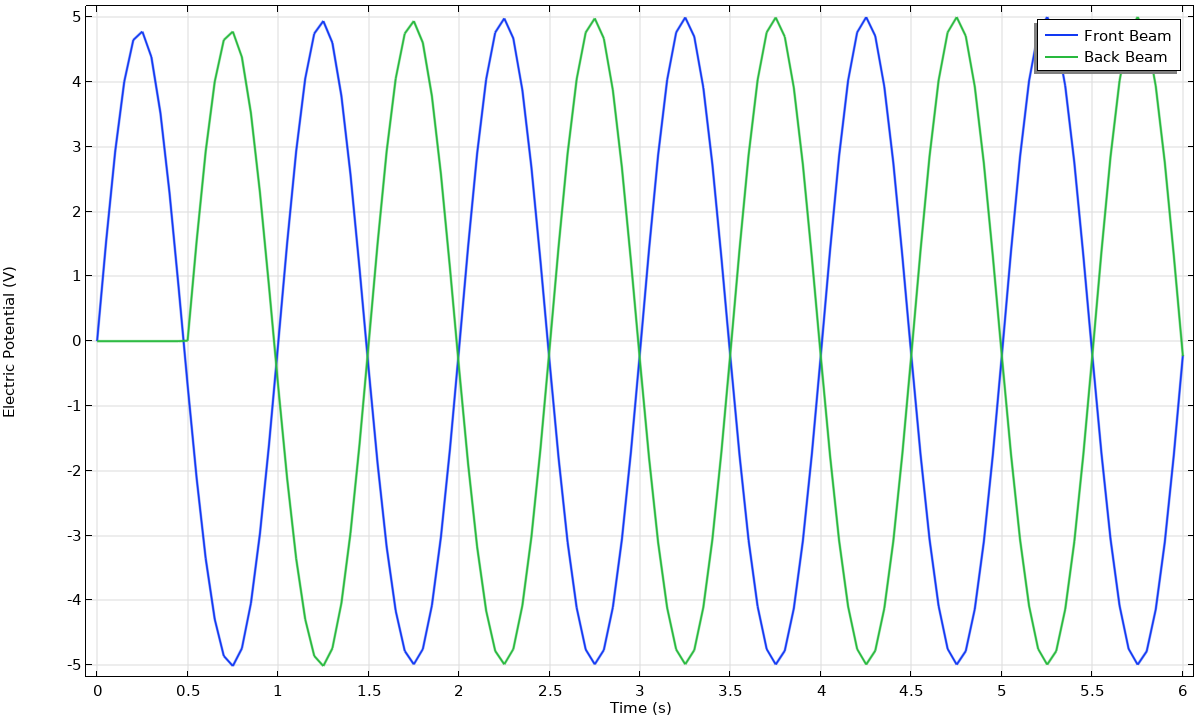
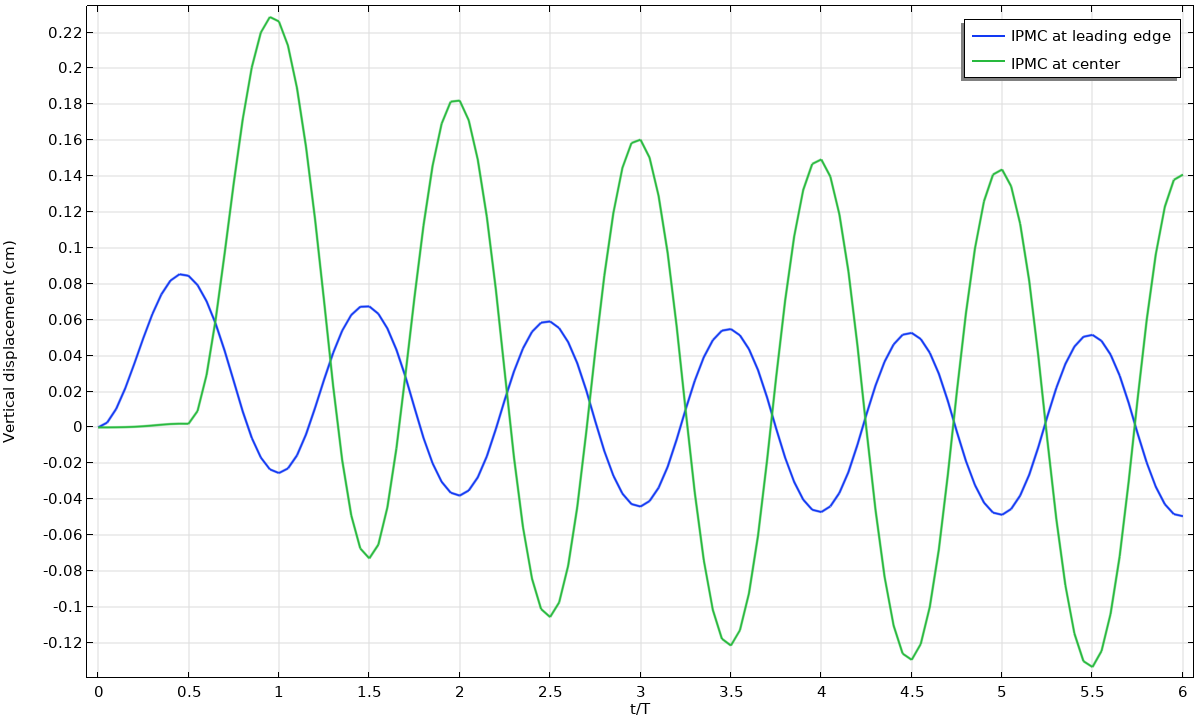
At left: A graph showing the sinusoidal input voltage with a phase delay between the IPMC beams. At right: A graph showing how the beams bend cyclically due to swelling.
The graph below displays the concentration of particles throughout the thickness of the beam, with the bottom beam on the left and the top beam on the right. The graph shows a sharp concentration gradient near the electrode interfaces, indicating that the uneven distribution of cations along the thickness results in the beam bending cyclically due swelling deformation. When there is a higher concentration of particles on one side, more space is needed to fit them, causing the material to shrink and swell in order to fit them where possible.
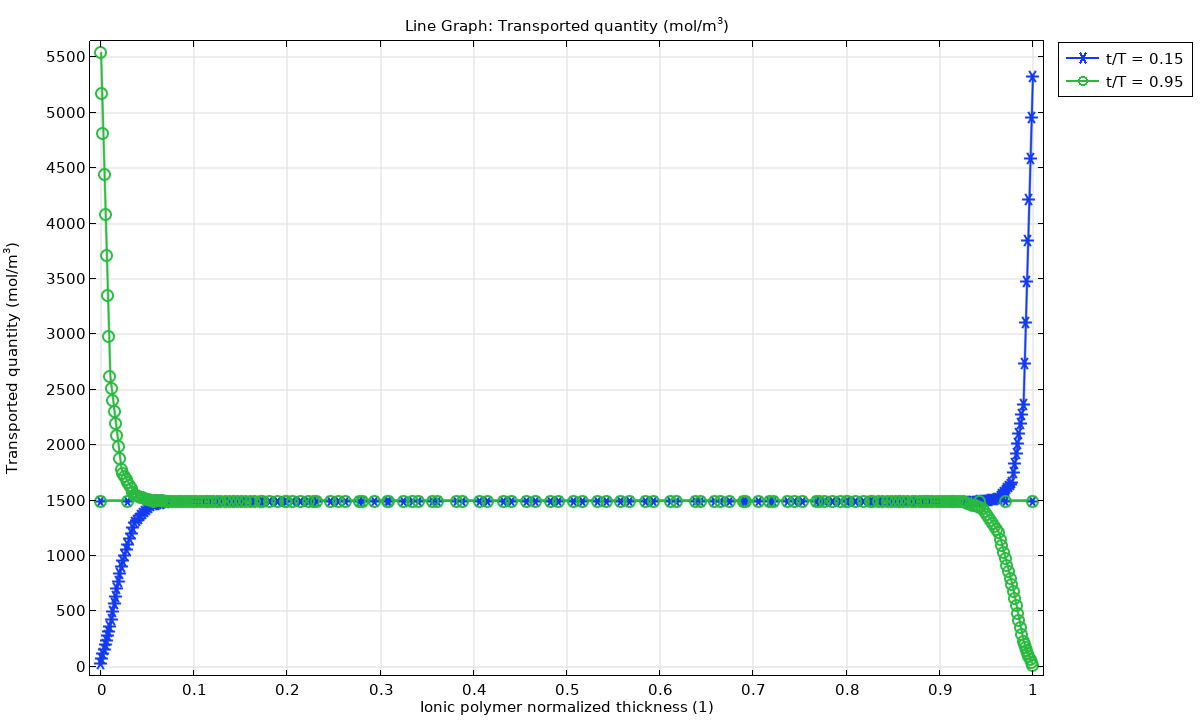 A graph showing how there is an uneven distribution of cations along the thickness of each beam, which causes the beam to bend due to concentration-induced swelling.
A graph showing how there is an uneven distribution of cations along the thickness of each beam, which causes the beam to bend due to concentration-induced swelling.
Next Step
Want to try modeling a robotic manta ray yourself? Download the related MPH file in the Application Gallery:
Further Reading
- Learn more about the world of soft robotics here:
- Read about the possibilities of soft robotics: Soft Robotics Enables Flexible Robot Designs to Take Shape
- Learn how scientists are using robotic fish to design aquatic robots: Studying the Swimming Patterns of Fish with Simulation

Comments (0)